




















1. Pengenalan kepada pemacu AC (pemacu kekerapan berubah -ubah) Dalam bidang kawalan perindustrian moden ......
Baca lebih lanjut
Rumah / Berita / Berita Industri / Bagaimana untuk memilih motor servo perindustrian yang betul untuk permohonan saya?
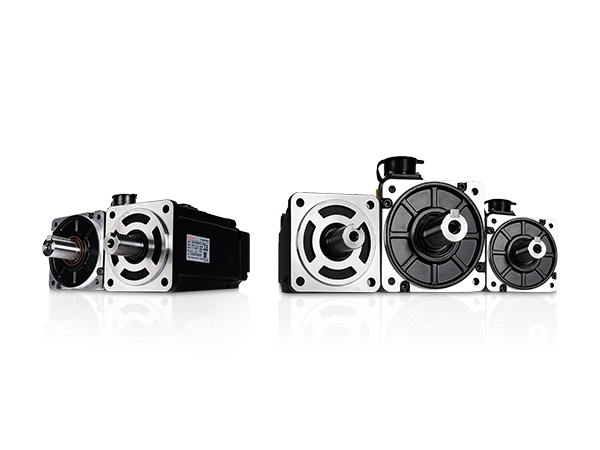
Bagaimana untuk memilih motor servo perindustrian yang betul untuk permohonan saya?
1. Tentukan keperluan aplikasi anda
Pertama, anda perlu mempunyai pemahaman yang mendalam tentang senario aplikasi anda. Tanya diri anda soalan -soalan ini:
-
Jenis gerakan : Adakah aplikasi anda memerlukan putaran berterusan, gerakan timbal balik, atau kedudukan yang tepat? Ini akan menentukan keperluan untuk kelajuan, tork, dan ketepatan.
-
Ciri -ciri beban : Berapa berat beban yang perlu didorong? Adakah beban inersia atau malar? Ini secara langsung memberi kesan kepada tork yang diperlukan.
-
Kitaran tugas : Adakah motor akan beroperasi secara berterusan atau berselang -seli? Berapa lama pecutan, kelajuan berterusan, dan fasa penurunan yang berlangsung semasa kitaran tugas? Ini menentukan keperluan untuk pelesapan haba motor dan kapasiti beban.
-
Keadaan alam sekitar : Dalam persekitaran jenis apakah motor akan beroperasi? Adakah terdapat suhu tinggi, kelembapan yang tinggi, habuk, atau bahan kimia yang menghakis? Faktor -faktor ini akan mempengaruhi penarafan perlindungan masuk motor (IP) dan pemilihan bahan.
2. Pertimbangan Parameter Teknikal Teras
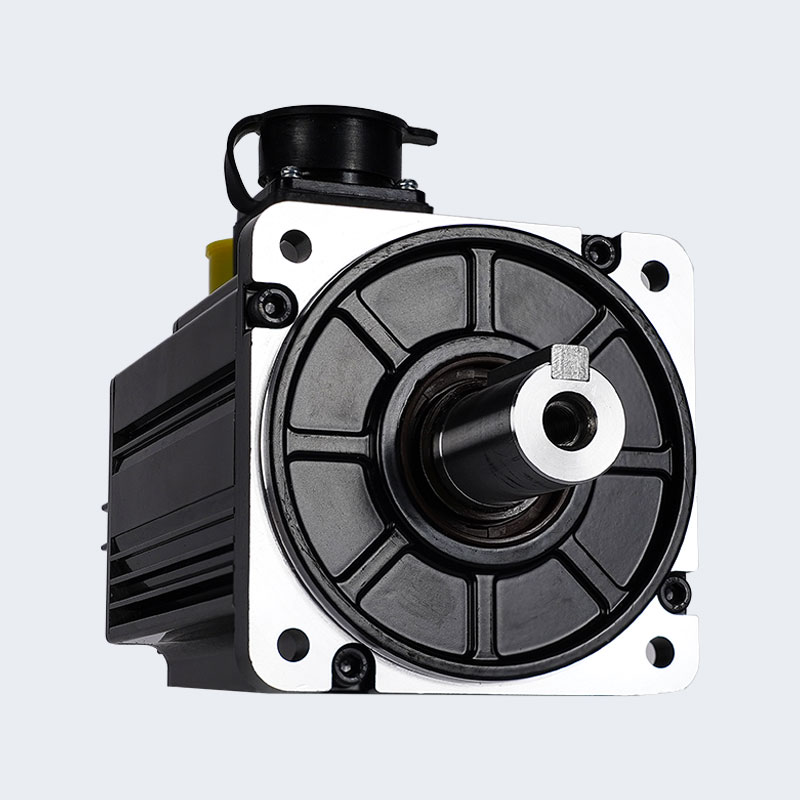
Setelah mendapat pemahaman yang jelas mengenai permohonan anda, anda boleh mula menilai parameter teknikal Servo Motor .
a. Tork
Tork adalah parameter utama apabila memilih motor servo. Ia dikategorikan kepada tiga jenis:
-
Tork Rated : Tork motor boleh terus mengeluarkan pada kelajuan yang dinilai. Ini adalah tork yang anda perlukan di bawah keadaan operasi biasa.
-
Tork puncak : Tork maksimum motor boleh dikeluarkan untuk tempoh yang singkat di bawah beban. Ini penting untuk pengendalian permulaan, pecutan, atau perubahan mendadak dalam beban. Pastikan tork puncak motor memenuhi permintaan tork seketika maksimum permohonan anda.
-
Memegang tork : Dalam sesetengah aplikasi, seperti yang memerlukan motor untuk mengekalkan kedudukannya selepas kehilangan kuasa, tork memegang adalah kritikal.
Pengiraan tork: Pengiraan tork yang tepat perlu mempertimbangkan inersia beban, geseran, graviti, dan tork percepatan/penurunan. Anda boleh menggunakan alat perisian profesional atau formula untuk ini, dan secara amnya disyorkan untuk memasukkan margin keselamatan 20-30%.
b. Kelajuan
Kelajuan juga merupakan faktor kritikal. Anda perlu tahu:
-
Kelajuan dinilai : Kelajuan di mana motor boleh beroperasi secara berterusan dan stabil.
-
Kelajuan maksimum : Kelajuan tertinggi motor dapat dicapai. Pastikan nilai ini memenuhi keperluan aplikasi anda, terutamanya dalam senario yang menuntut tindak balas yang cepat.
c. Pemadanan inersia
Pencocokan inersia adalah salah satu aspek yang paling mudah diabaikan, namun penting, memilih a Servo Motor .
-
Secara teorinya , nisbah padanan optimum biasanya 1: 1.
-
Praktikal , Untuk sambungan tegar, nisbah yang disyorkan biasanya antara 3: 1 dan 5: 1. Untuk beban inersia yang tinggi, nisbah ini boleh sedikit lebih tinggi, tetapi nisbah yang terlalu tinggi (mis., Di atas 10: 1) boleh membuat sistem sukar untuk menyesuaikan, menyebabkan getaran, atau bahkan menyebabkan ketidakstabilan.
d. Peranti maklum balas
Peranti maklum balas adalah di tengah -tengah kawalan tepat sistem servo. Jenis biasa termasuk:
-
Encoder : Menyediakan kedudukan dan maklumat kelajuan. Resolusi yang lebih tinggi membawa kepada ketepatan kedudukan yang lebih baik. Pengekod tambahan dan mutlak masing -masing mempunyai kebaikan dan keburukan mereka; Yang pertama adalah lebih murah tetapi memerlukan homel semula selepas kehilangan kuasa, sementara yang terakhir tidak.
-
Resolver : Melakukan lebih stabil dalam persekitaran yang keras (suhu tinggi, getaran) tetapi biasanya mempunyai resolusi yang lebih rendah daripada pengekod.
3. Integrasi dan keserasian sistem
Memilih a Servo Motor bukan hanya memilih motor itu sendiri; Ia juga mengenai mempertimbangkan keserasiannya dengan keseluruhan sistem kawalan.
-
Pemacu servo : Pastikan motor dan pemacu servo serasi, idealnya dari jenama yang sama atau dengan keserasian yang disahkan. Pemacu perlu menyediakan arus dan voltan yang mencukupi untuk menguasai motor dan menyokong mod kawalan yang diperlukan (mis., Kedudukan, kelajuan, atau kawalan tork).
-
Pengawal : Semak jika Servo Motor dan Drive boleh berkomunikasi dengan pengawal utama anda (PLC, IPC, dan lain -lain). Protokol komunikasi biasa termasuk Ethercat, Profinet, dan Canopen.
-
Penilaian IP : Pilih penarafan IP yang sesuai berdasarkan persekitaran kerja anda. Sebagai contoh, IP65 atau IP67 biasanya digunakan dalam persekitaran berdebu atau basah.
Kesimpulan
Memilih perindustrian yang betul Servo Motor adalah proses sistematik yang memerlukan penilaian komprehensif terhadap keperluan aplikasi, parameter teknikal utama, dan keserasian dengan keseluruhan sistem kawalan. Kami mengesyorkan bekerjasama dengan pembekal profesional atau jurutera untuk menggunakan kepakaran dan sokongan teknikal mereka untuk pengiraan dan pemilihan yang tepat, memastikan peralatan automatik anda beroperasi dengan cekap dan stabil.
Catatan sebelumnya
Apakah aplikasi biasa motor servo perindustrian?
Catatan seterusnya
Apakah perbezaan antara motor servo dan motor stepper?
Hak cipta 2024 Fujian Raynen Technology Co., Ltd. Semua hak terpelihara.
Dasar Privasi  Pengilang Kawalan Motor
Pengilang Kawalan Motor