




















1. Pengenalan kepada pemacu AC (pemacu kekerapan berubah -ubah) Dalam bidang kawalan perindustrian moden ......
Baca lebih lanjut
Rumah / Berita / Berita Industri / Motor Servo AC Menjelaskan: Cara Ia Berfungsi, Jenis dan Cara Memilih Yang Tepat
Motor Servo AC Menjelaskan: Cara Ia Berfungsi, Jenis dan Cara Memilih Yang Tepat
Apakah Motor Servo AC?
Motor servo AC ialah sejenis motor elektrik yang berjalan pada arus ulang alik dan direka bentuk untuk memberikan kawalan tepat ke atas kedudukan, kelajuan dan tork. Tidak seperti motor AC biasa yang hanya berputar pada kelajuan tetap, motor servo sentiasa menerima maklum balas daripada pengekod yang dipasang pada acinya. Maklum balas itu memberitahu sistem dengan tepat di mana motor berada pada bila-bila masa, membolehkannya membuat pembetulan masa nyata dan mengekalkan kedudukan sasarannya dengan ketepatan yang tinggi.
Perkataan "servo" berasal daripada perkataan Latin untuk hamba — dan pada dasarnya itulah yang dilakukannya. Ia dengan setia mengikut arahan daripada pengawal, melaraskan dirinya secara berterusan untuk memadankan apa jua kedudukan, kelajuan atau tork yang diminta. Ini menjadikan motor servo AC sebagai tulang belakang automasi moden, mesin CNC, robotik, dan sebarang aplikasi yang memerlukan pergerakan ketepatan.
Apa yang memisahkan motor servo AC daripada motor servo DC ialah sumber kuasa dan pembinaan. Motor servo AC secara amnya lebih tahan lama, memerlukan kurang penyelenggaraan (tiada berus untuk diganti), dan lebih sesuai untuk persekitaran industri berkelajuan tinggi dan berkuasa tinggi. Ia hampir selalu digunakan bersama pemacu servo (juga dipanggil penguat servo) dan pengawal gerakan untuk membentuk sistem servo gelung tertutup yang lengkap.
Cara Motor Servo AC Berfungsi
Prinsip teras di sebalik motor servo AC ialah kawalan maklum balas gelung tertutup. Berikut ialah pecahan langsung tentang cara sistem beroperasi dari awal hingga akhir:
- Input arahan: Pengawal gerakan (PLC, pengawal CNC atau PC) menghantar nilai sasaran — seperti "putar 90 darjah" atau "pusing pada 3,000 RPM" — ke pemacu servo.
- Output pemacu servo: Pemacu servo menukar arahan kepada voltan dan arus AC yang dikawal dengan tepat, yang disalurkan ke motor.
- Pergerakan motor: Rotor motor bergerak sebagai tindak balas kepada medan elektromagnet yang dicipta oleh belitan stator.
- Maklum balas pengekod: Pengekod berputar yang dipasang pada aci motor secara berterusan mengukur kedudukan dan kelajuan sebenar, menghantar data ini kembali ke pemacu servo.
- Pembetulan ralat: Pemacu membandingkan kedudukan sebenar dengan kedudukan yang diperintahkan dan serta-merta melaraskan output untuk menghapuskan sebarang perbezaan (dipanggil "ralat").
Gelung ini berjalan beratus atau beribu kali sesaat, itulah sebabnya sistem servo boleh mencapai toleransi yang begitu ketat. Pengekod ialah komponen kritikal — kebanyakan motor servo AC moden menggunakan pengekod resolusi tinggi dengan resolusi 17-bit atau 23-bit, bermakna ia boleh mengesan berjuta-juta kedudukan berbeza setiap revolusi.
Jenis Motor Servo AC
Terdapat dua jenis utama motor servo AC yang digunakan dalam industri hari ini, masing-masing dengan prinsip operasi yang berbeza dan kes penggunaan yang ideal.
Motor Servo AC Segerak (PMSM)
Yang segerak Motor servo AC — juga dikenali sebagai Motor Segerak Magnet Kekal (PMSM) — menggunakan magnet kekal yang tertanam dalam rotor. Rotor berputar dalam penyegerakan tepat dengan medan magnet berputar dalam stator. Oleh kerana magnet sentiasa disambungkan, motor jenis ini menghasilkan tork yang tinggi walaupun pada kelajuan rendah dan mempunyai tindak balas dinamik yang sangat baik.
Motor servo segerak adalah jenis yang paling biasa digunakan dalam automasi industri dan aplikasi CNC. Ia padat, cekap dan mampu mengekalkan tork terkadar merentasi julat kelajuan yang luas. Jenama seperti Mitsubishi, Fanuc, Yaskawa dan Siemens semuanya menawarkan motor servo segerak sebagai barisan produk utama mereka.
Motor Servo AC aruhan (Asynchronous)
Motor servo aruhan menggunakan rotor sangkar tupai di mana arus diaruhkan oleh medan magnet berputar — tiada magnet kekal. Rotor sentiasa ketinggalan sedikit di belakang medan pemegun (ini dipanggil "gelincir"), iaitu bagaimana tork dijana. Apabila dipasangkan dengan pemacu servo kawalan vektor, motor aruhan juga boleh mencapai kawalan kelajuan dan tork yang baik, walaupun lazimnya tidak setepat atau responsif seperti jenis segerak.
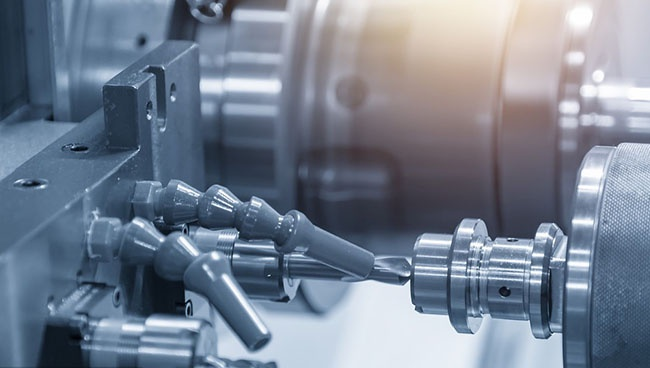
Motor servo aruhan sering dipilih untuk aplikasi gelendong berkuasa tinggi, seperti gelendong mesin pengilangan CNC, di mana kelajuan dan kekasaran yang sangat tinggi lebih penting daripada kedudukan ultra-tepat. Mereka juga lebih murah pada penarafan kuasa yang lebih besar.
Spesifikasi Utama Anda Perlu Faham
Sebelum memilih atau bekerja dengan mana-mana motor servo AC, anda perlu memahami spesifikasi teras pada lembaran data. Berikut ialah pecahan bahasa biasa bagi parameter yang paling penting:
| Spesifikasi | Apa Maksudnya | Mengapa Ia Penting |
| Tork Dinilai (N·m) | Tork berterusan yang boleh dihasilkan oleh motor pada kelajuan terkadar | Mesti melebihi tork beban termasuk geseran dan inersia |
| Tork Puncak (N·m) | Tork maksimum untuk letupan pendek (biasanya 2–3× berkadar) | Diperlukan untuk fasa pecutan dan nyahpecutan |
| Kelajuan Dinilai (RPM) | Kelajuan operasi biasa pada tork terkadar | Tentukan sama ada motor sesuai dengan profil gerakan anda |
| Kuasa Berkadar (W atau kW) | Kuasa mekanikal output (torsi × kelajuan) | Digunakan untuk memadankan pemacu dan saiz kabel/pemutus |
| Resolusi Pengekod | Bilangan denyutan atau bit setiap revolusi | Resolusi yang lebih tinggi = kawalan kedudukan yang lebih halus |
| Inersia pemutar (kg·cm²) | Rintangan rotor terhadap perubahan kelajuan putaran | Mesti dipadankan dengan inersia beban untuk kawalan yang stabil |
| Penarafan IP | Tahap perlindungan terhadap kemasukan habuk dan air | Kritikal untuk persekitaran yang keras atau basah |
Motor Servo AC vs Motor Stepper: Mana Yang Perlu Anda Gunakan?
Salah satu soalan yang paling biasa dalam kawalan gerakan ialah sama ada hendak menggunakan motor servo AC atau motor stepper. Kedua-duanya boleh mengawal kedudukan, tetapi ia berfungsi dengan sangat berbeza dan sesuai dengan aplikasi yang berbeza.
Motor stepper bergerak dalam kenaikan tetap (langkah) dan mengendalikan gelung terbuka — bermakna tiada maklum balas pengekod dalam kebanyakan persediaan asas. Ia mudah, murah dan berfungsi dengan baik untuk beban ringan pada kelajuan sederhana. Walau bagaimanapun, stepper boleh terlepas langkah dalam keadaan beban lampau tanpa sebarang pembetulan sendiri, dan mereka kehilangan tork yang ketara pada kelajuan yang lebih tinggi.
Motor servo AC, sebaliknya, sentiasa mengetahui dengan tepat di mana ia berada terima kasih kepada pengekod. Ia tidak akan kehilangan kedudukan di bawah beban, bertindak balas lebih pantas kepada arahan dan mengekalkan tork penuh merentasi julat kelajuan yang luas. Pertukarannya ialah kos dan kerumitan — sistem servo (penalaan kabel pemacu motor) kos jauh lebih tinggi daripada persediaan stepper saiz yang setara.
Berikut ialah peraturan mudah: gunakan stepper untuk kedudukan mudah, beban rendah, kelajuan rendah di mana kos adalah kritikal. Gunakan motor servo AC apabila anda memerlukan kelajuan tinggi, tork tinggi, perubahan beban dinamik, atau apabila ketepatan kedudukan tidak boleh dirunding.

Aplikasi Biasa Motor Servo AC
Motor servo AC muncul di hampir setiap industri di mana gerakan terkawal diperlukan. Beberapa aplikasi yang paling biasa termasuk:
- Pusat Pemesinan CNC: Motor servo memacu paksi X, Y dan Z pada mesin penggilingan dan pelarik, serta gelendong dalam beberapa konfigurasi. Mereka membenarkan mesin memotong bentuk kompleks dengan ketepatan tahap mikron.
- Robot Perindustrian: Setiap sambungan lengan robot 6 paksi biasanya digerakkan oleh motor servonya sendiri. Kawalan yang diselaraskan bagi semua sendi membolehkan pergerakan cecair dan tepat di sepanjang laluan yang kompleks.
- Mesin Pembungkusan: Motor servo mengawal operasi pengindeksan, pemotongan, pengedap dan pengisian dalam talian pembungkusan berkelajuan tinggi, di mana kebolehulangan dan kelajuan adalah penting.
- Pembuatan Semikonduktor: Pengendalian wafer, sistem pilih dan letak, dan peralatan pemeriksaan bergantung pada motor servo untuk kebolehulangan kedudukan peringkat nanometer.
- Mencetak dan Menukar: Kawalan daftar dalam mesin cetak dan kawalan ketegangan dalam sistem pengendalian web bergantung pada motor servo untuk mengekalkan suapan bahan yang konsisten.
- Peralatan Perubatan: Pengimbas CT, robot pembedahan, dan pam infusi menggunakan motor servo yang kecil dan tepat untuk memastikan operasi yang selamat dan tepat.
Cara Memilih Motor Servo AC yang Betul
Memilih motor servo AC yang betul adalah untuk memadankan dengan teliti keupayaan motor dengan permintaan aplikasi anda. Tergesa-gesa langkah ini membawa kepada sama ada sistem kurang kuasa yang gagal dalam lapangan atau penyelesaian yang terlalu besar dan terlalu mahal. Ikuti langkah ini:
Langkah 1 — Tentukan Keperluan Muatan Anda
Mulakan dengan mengira tork beban, yang merangkumi daya atau berat yang digerakkan, geseran, dan sebarang penghantaran mekanikal (kotak gear, tali pinggang, skru bebola). Kirakan inersia beban juga — ini memberitahu anda berapa banyak tenaga yang perlu disediakan oleh motor untuk mempercepatkan beban. Garis panduan umum industri adalah untuk mengekalkan nisbah inersia beban-ke-motor di bawah 10:1 untuk kestabilan kawalan yang baik, dan idealnya 3:1 atau kurang untuk aplikasi dinamik tinggi.
Langkah 2 — Tentukan Profil Gerakan Anda
Lakarkan graf kelajuan lwn masa untuk kitaran gerakan anda. Perhatikan kelajuan puncak yang diperlukan, masa pecutan dan nyahpecutan, dan kitaran tugas (berapa lama motor berjalan secara berterusan vs. rehat). Ini menentukan kedua-dua tork puncak yang diperlukan (semasa pecutan) dan tork RMS (min kuasa dua akar), yang mesti kekal di bawah tork berterusan terkadar motor untuk mengelakkan terlalu panas.
Langkah 3 — Pilih Rangka Motor dan Penarafan Kuasa
Sebaik sahaja anda mengetahui keperluan tork dan kelajuan anda, pilih motor dengan tork yang diberi nilai dan kelajuan yang diberi nilai yang memenuhi keperluan anda dengan selesa dengan sedikit margin (biasanya 20–30%). Juga sahkan saiz bingkai fizikal sesuai dengan ruang pelekap anda — motor servo biasanya tersedia dalam saiz bebibir daripada 40mm hingga 200mm atau lebih besar.
Langkah 4 — Padankan Pemacu Servo
Pemacu servo mesti dipadankan dengan voltan, arus dan jenis pengekod motor. Kebanyakan pengeluar menjual set pemacu motor yang dipadankan (cth., siri Yaskawa Sigma, siri Mitsubishi MR-J, siri Siemens S-1FK) yang memudahkan persediaan. Jika mencampurkan jenama, sahkan keserasian dengan teliti merentas penarafan voltan, protokol pengekod (tambahan, mutlak, EnDat, BiSS-C, dll.), dan antara muka kawalan (nadi/arah, analog ±10V, EtherCAT, PROFINET, dsb.).
Langkah 5 — Pertimbangkan Keadaan Persekitaran
Semak persekitaran operasi. Jika motor akan terdedah kepada penyejuk, habuk atau pencucian, anda memerlukan motor berkadar IP65 atau IP67. Jika ia akan beroperasi dalam suhu yang melampau, sahkan julat suhu ambien motor. Untuk aplikasi makanan dan minuman atau farmaseutikal, pengedap aci keluli tahan karat dan salutan khas mungkin diperlukan.
Asas Pendawaian dan Pemasangan
Memasang motor servo AC dengan betul adalah sama pentingnya dengan memilih yang betul. Beberapa perkara penting yang perlu diingat:
- Kabel kuasa dan isyarat berasingan: Sentiasa halakan kabel kuasa motor (fasa U, V, W) secara berasingan daripada kabel maklum balas pengekod. Menjalankannya dalam konduit yang sama boleh menyebabkan gangguan yang menjejaskan kestabilan gelung kawalan.
- Gunakan kabel terlindung: Kedua-dua kabel kuasa dan kabel pengekod hendaklah dilindungi, dengan perisai dibumikan pada satu hujung (biasanya hujung pemacu) untuk mengelakkan pengambilan hingar.
- Tanahkan badan motor: Perumahan motor mesti disambungkan ke tanah rangka mesin untuk mengelakkan kejutan elektrik dan mengurangkan pelepasan EMI.
- Semak urutan fasa: Sambungan U, V, W mesti sepadan antara motor dan pemacu. Jika motor berjalan dalam arah yang salah, tukar mana-mana wayar dua fasa — jangan sekali-kali menukar wayar pengekod untuk menetapkan arah.
- Gunakan perintang brek dinamik: Untuk motor yang memandu beban menegak atau memerlukan hentian pantas, perintang brek luaran yang disambungkan kepada pemacu menyerap tenaga penjanaan semula semasa nyahpecutan dan menghalang kerosakan voltan lampau.
Penalaan Pemacu Servo: Mendapat Prestasi Terbaik
Selepas pendawaian, pemacu servo perlu ditala supaya gelung kawalan bertindak balas dengan betul untuk kombinasi beban motor khusus anda. Kebanyakan pemacu servo moden termasuk fungsi penalaan automatik yang memutar motor melalui rutin ujian dan mengira tetapan keuntungan optimum secara automatik. Ini biasanya cukup baik untuk aplikasi standard.
Untuk aplikasi yang menuntut — seperti pick-and-place berkelajuan tinggi atau pengisaran ketepatan — penalaan manual bagi tiga keuntungan PID utama (tambah kedudukan, keuntungan halaju dan keuntungan kamiran) mungkin diperlukan. Meningkatkan keuntungan menjadikan sistem bertindak balas lebih cepat dan lebih keras, tetapi terlalu tinggi dan sistem menjadi tidak stabil dan berayun. Matlamatnya adalah untuk mencapai tindak balas pantas tanpa overshoot atau memburu.
Kebanyakan pemacu juga membolehkan anda menetapkan penapis takuk untuk menyekat frekuensi resonans mekanikal, keuntungan suapan hadapan untuk meningkatkan ketepatan penjejakan semasa pecutan dan pampasan geseran untuk mengurangkan ralat kedudukan pada kelajuan rendah. Mengambil masa untuk menala tetapan ini dengan betul boleh membuat perbezaan yang ketara dalam ketepatan kedudukan akhir dan daya pemprosesan mesin.
Petua Penyelenggaraan dan Penyelesaian Masalah
Motor servo AC secara amnya sangat dipercayai kerana ia tidak mempunyai berus atau komutator untuk haus. Walau bagaimanapun, beberapa penyelenggaraan masih diperlukan dari semasa ke semasa:
- Penggantian galas: Galas motor adalah item haus yang paling biasa. Kebanyakan pengeluar menentukan selang penggantian bearing berdasarkan waktu operasi — biasanya setiap 20,000 hingga 30,000 jam. Getaran atau bunyi yang berlebihan adalah tanda awal kehausan bearing.
- Pemeriksaan kabel pengekod: Kabel pengekod selalunya dibengkokkan berulang kali (terutamanya pada lengan robot atau sistem gantri) dan boleh menyebabkan pecah dalaman dari semasa ke semasa. Jika servo mula menunjukkan ralat atau ralat kedudukan yang tidak menentu, syaki kabel pengekod terlebih dahulu.
- Pemeriksaan terlalu panas: Jika motor berjalan panas, sahkan bahawa kitaran tugas berada dalam spesifikasi, suhu ambien boleh diterima, dan permukaan motor bersih dan tidak terhalang. Terlalu panas yang berterusan merendahkan penebat belitan dan memendekkan hayat motor.
- Kod penggera memandu: Apabila kerosakan berlaku, sentiasa baca kod penggera daripada paparan pemacu servo atau perisian. Kod biasa termasuk lebihan voltan, lebihan arus, ralat pengekod, lebihan beban dan lebihan sisihan kedudukan. Masing-masing menunjukkan anda terus kepada punca utama.
Menyimpan log penyelenggaraan bagi waktu operasi motor, sejarah penggera dan sebarang pemeriksaan fizikal membantu meramalkan kegagalan sebelum ia menyebabkan masa henti yang tidak dirancang.
Catatan sebelumnya
Tiada artikel sebelumnya
Catatan seterusnya
Pemacu Kekerapan Pembolehubah Voltan Sederhana Diterangkan: Cara Ia Berfungsi, Topologi Mana yang Perlu Dipilih dan Perkara yang Perlu Ditentukan
Hak cipta 2024 Fujian Raynen Technology Co., Ltd. Semua hak terpelihara.
Dasar Privasi  Pengilang Kawalan Motor
Pengilang Kawalan Motor